
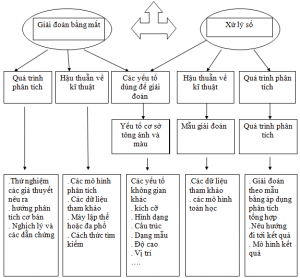
Phương pháp giải đoán ảnh viễn thám và lập bản đồ chuyên đề
Công nghệ viễn thám và GIS là một công cụ... Xem chi tiết →
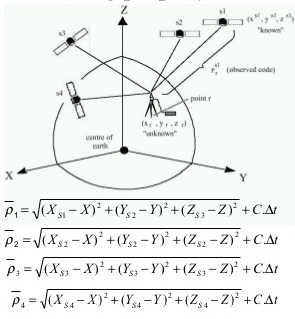
Đo GPS tuyệt đối là sử dụng máy thu GPS để xác định một cách trực tiếp tọa độ của điểm đặt máy quan sát trong hệ thống tọa độ WGS-84. Thành phần tọa độ có thể là X,Y,Z trong hệ tọa độ vuông góc không gian địa tâm hoặc B,L,H trong hệ tọa độ mặt cầu.
Khi vị trí các vệ tinh trên quỹ đạo đã biết một cách chính xác, chỉ cần máy thu xác định được khoảng cách từ nó đến 3 vệ tinh, ta sẽ xác định được tọa độ của điểm quan sát theo phương pháp giao hội cạnh.
Tuy nhiên, trong công thức trên còn chứa một ẩn số chưa xác định là Δt. VÌ vậy để giải bài toán trên, ta cần tối thiểu 4 khoảng cách giả từ máy thu tới 4 vệ tinh để lập hệ phương trình.
Với hệ thống vệ tinh GPS như hiện nay, tại một điểm bất kì trên mặt đất thường có thể quan sát từ 6-8 vệ tinh, có trường hợp tới 10 vệ tinh trên bầu trời. Khi đó sẽ sử dụng phương pháp số bình phương nhỏ nhất để xử lý số liệu tìm ra tọa độ các điểm và đánh giá độ chính xác kết quả.
Phương pháp đo GPS tuyệt đối thường cho độ chính xác kém, sai số tọa độ cỡ hàng chục mét. Người ta khắc phục nhược điểm này bằng cách sử dụng đồng thời hai máy thu, định vị theo phương pháp vi phân. một máy cơ sở đặt cố định tại một điểm đã biết tọa độ, các máy khác di chuyển đến đo tại các điểm cần xác định. Máy cơ sở đo tọa độ điểm rồi so sánh với tọa độ đã biết để xác định số cải chính cạnh thô. Nếu khu đo không lớn, có thể coi môi trường trong khu đo là đồng nhất. Số cải chính cạnh thô ở máy cố định được truyền tới các máy di động để tính số cải chính cho từng điểm quan sát.
Bạn đọc có thể tìm hiểu thêm về định vị GPS và xử lý số liệu đo GPS tại đây:
 Cài đặt VN2000 máy GPS cầm tay Garmin 64S (0)
Cài đặt VN2000 máy GPS cầm tay Garmin 64S (0) Một số hệ tọa độ dùng trong đo đạc vệ tinh (0)
Một số hệ tọa độ dùng trong đo đạc vệ tinh (0)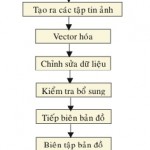 Quy trình thành lập bản đồ số từ bản đồ giấy (0)
Quy trình thành lập bản đồ số từ bản đồ giấy (0) Bán buôn máy thủy bình tại Cao Bằng (0)
Bán buôn máy thủy bình tại Cao Bằng (0) Chuyển dữ liệu từ máy tính sang máy toàn đạc điện tử Topcon (4)
Chuyển dữ liệu từ máy tính sang máy toàn đạc điện tử Topcon (4)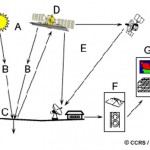 Viễn thám là gì (0)
Viễn thám là gì (0)
Công nghệ viễn thám và GIS là một công cụ... Xem chi tiết →
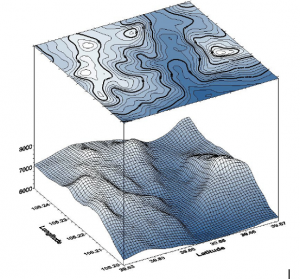
Một số ứng dụng của DEM trong GIS Ngày nay... Xem chi tiết →
Phương pháp xây dựng mô hình số độ cao Phương... Xem chi tiết →
Phương pháp biểu thị mô hình số độ cao Sự... Xem chi tiết →



