
Bán buôn máy thủy bình tại Vĩnh Long
Công ty Trắc địa Lê Linh là tổng đại lý... Xem chi tiết →
Công nghệ định vị GPS ngày nay đã được ứng dụng khá nhiều trong lĩnh vực đo đạc và nó cũng đã được ứng dụng trong công tác quan trắc chuyển dịch ngang công trình
Công tác thiết kế và thành lập lưới bằng công nghệ GPS bạn có thể xem: https://tracdiapro.com/thanh-lap-luoi-khong-che-trac-dia-bang-cong-nghe-gps/
Việc phân tích độ ổn định các mốc lưới khống chế cơ sở quan trắc chuyển dịch ngang đo bằng công nghệ GPS có thể được thực hiện có hiệu quả nhờ áp dụng thuật toán bình sai lưới GPS tự do. Theo đó, quy trình tính toán được triển khai theo các bước sau:
1. Chọn ẩn số: ẩn số được chọn là trị bình sai của các tọa độ vuông góc không gian địa tâm của tất cả các điểm.
2. Chọn trị gần đúng: trị gần đúng của các ẩn số được chọn là tọa độ vuông góc không gian địa tâm đã bình sai của các điểm trong các chu kỳ trước đó. Với cách lựa chọn này, số hiệu chỉnh vào tọa độ gần đúng của các điểm sẽ phản ánh độ lệch tọa độ của các điểm giữa hai thời điểm quan trắc (2 chu kỳ), tức là chuyển dịch của điểm.
3. Lập hệ phương trình số hiệu chỉnh của các trị đo. Trong đó, các số hạng tự do được tính thông qua các trị gần đúng và các trị đo, nhận được từ kết quả giải cạnh và được lưu trữ trong file *.html.
4. Tính trọng số của các trị đo theo công thức sau
Một đặc điểm cần lưu ý là sai số trung phương trọng số đơn vị sau bình sai (mO) thường khác 1 rất nhiều lần. Do đó, giá trị này cần phải được kiểm định dựa vào tiêu chuẩn Chi–bình phương ( ). Sai số trung phương trọng số đơn vị cho thấy giá trị phương sai tiên nghiệm của các trị đo GPS được xác định đúng hay không. Nếu đúng (P=1) thì có thể kết thúc quá trình bình sai, nếu không đúng (P>>1) thì cần phải ước lượng lại trọng số (chuẩn hóa trọng số) và thực hiện bình sai lặp. Lúc này, trọng số P của các trị đo GPS được tính dựa vào ma trận hiệp phương sai Q đã nhân với mo2 được xác định ở bước trước. Đây chính là một đặc điểm cần lưu ý khi tính trọng số
– Trong lần tính lặp đầu tiên, chọn Ci=Bi đối với tất cả các điểm trong lưới.
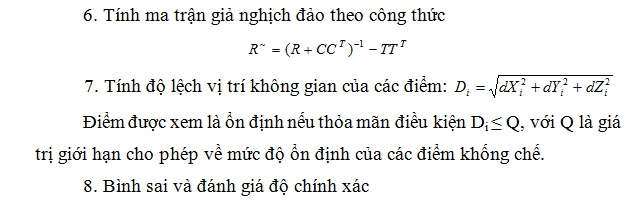
– Trong lần tính lặp tiếp theo, chọn Ci=Bi đối với các điểm ổn định, và Ci=0 (ma trận 0) đối với điểm có dấu hiệu kém ổn định nhất trong lưới. Quá trình tính lặp kết thúc khi với điều kiện ràng buộc hiện tại được chọn, các điểm đều có giá trị độ lệch vị trí trong giới hạn cho phép.
Có thể thấy thuật toán phân tích độ ổn định các mốc cơ sở quan trắc chuyển dịch ngang đo bằng công nghệ GPS như đã trình bày ở trên cho phép xác định chuyển dịch của các điểm nhờ việc bình sai lưới GPS tự do trong hệ tọa độ WGS-84 mà không cần phải chuyển đổi tọa độ hoặc bình sai ràng buộc lưới. Đồng thời, thuật toán này cũng hết sức chặt chẽ, dễ dàng triển khai lập trình để giải bài toán trên máy tính điện tử. Bạn có thể tham khảo bài toán bình sai lưới GPS bằng phần mềm TBC tại đây
Bạn có thể tham khảo một số hệ tọa độ dùng trong đo đạc vệ tinh tại đây
Nếu chỉ sử dụng hệ tọa độ vuông góc không gian địa tâm để xem xét chuyển dịch công trình thì đó chỉ là lượng chuyển dịch trong không gian. Điều quan trọng nhất là cần phải xác định được hướng và độ lớn chuyển dịch trong mặt phẳng công trình, tức là cần phải tính chuyển lượng chuyển dịch không gian của các điểm (trong hệ WGS-84) về hệ tọa độ địa diện chân trời. Quy trình được thực hiện như sau:
Dựa vào kết quả đo GPS (bao gồm toạ độ vuông góc không gian địa tâm X,Y,Z và toạ độ trắc địa B,L của các điểm trong hệ toạ độ WGS-84) để tính chuyển về hệ toạ độ địa diện.
Sau khi tính toán bình sai, nhận được các giá trị tọa độ vuông góc không gian địa tâm sau bình sai (Xi, Yi, Zi) của “chu kỳ” 0, “chu kỳ” 1 và độ lệch tọa độ giữa 2 chu kỳ (dXi, dYi, dZi). Độ lệch này chính là sự thay đổi của các mốc, sử dụng các giá trị thay đổi đó để tính chuyển sang hệ tọa độ địa diện chân trời. Việc tính chuyển được thực hiện theo công thức
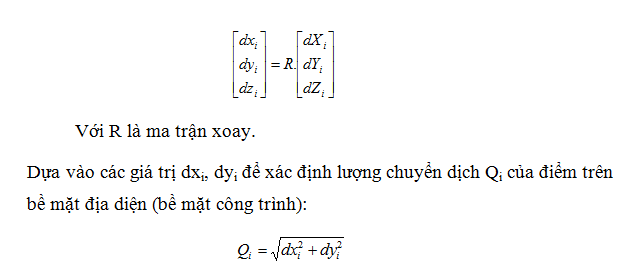
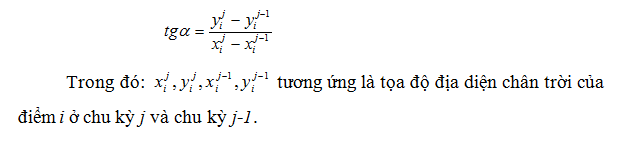
Sau khi bình sai xác định được tọa độ vuông góc không gian và lượng chuyển dịch trong không gian, công tác tiếp theo là xác định hướng chuyển dịch của các điểm mốc. Để xác định được hướng chuyển dịch cần tính chuyển tọa độ các điểm mốc từ hệ tọa độ vuông góc không gian địa tâm về hệ tọa độ địa diện chân trời. Thuật toán và quy trình tính chuyển đã được trình bày ở trên.
Hướng chuyển dịch của điểm i được tính như sau
 Trắc địa công trình nhà cao tầng (0)
Trắc địa công trình nhà cao tầng (0) Các phương pháp quan trắc chuyển dịch ngang công trình (0)
Các phương pháp quan trắc chuyển dịch ngang công trình (0) Trình tự và thủ tục cấp giấy chứng nhận quyền sử dụng đất (0)
Trình tự và thủ tục cấp giấy chứng nhận quyền sử dụng đất (0) Máy Trắc đạc RTK (0)
Máy Trắc đạc RTK (0) Bán buôn máy thủy bình tại Yên Bái (0)
Bán buôn máy thủy bình tại Yên Bái (0)

